El sistema de transport per via no tripulat per a mines subterrànies

Funcions del sistema
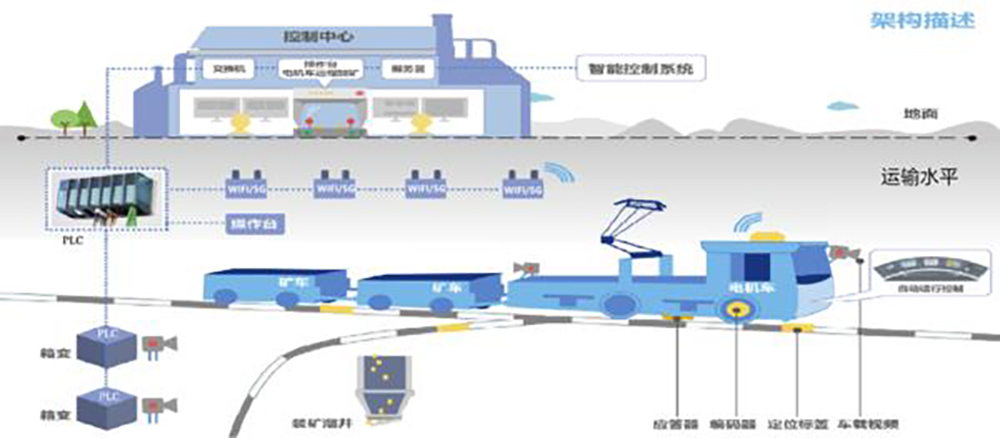
El sistema de locomotores elèctrics sense conductor consta d'un sistema de control d'operació automàtica (ATO), una unitat de control PLC, una unitat de posicionament de precisió, una unitat de dispensació intel·ligent, una unitat de xarxa de comunicació sense fils, una unitat de control de tancament centralitzada del senyal d'interruptor, una monitorització de vídeo i una IA de vídeo. sistema i un centre de control.
Breu descripció de la funció
Funcionament de creuer totalment automàtic:d'acord amb la teoria del creuer de velocitat fixa, d'acord amb la situació i els requisits reals a cada punt del nivell de transport, el model de creuer del vehicle es construeix per realitzar l'ajust autònom de la velocitat de viatge de la locomotora.
Sistema de posicionament precís:El posicionament precís de la locomotora s'aconsegueix mitjançant tecnologia de comunicació i tecnologia de reconeixement de balises, etc., amb elevació automàtica de proa i ajust autònom de velocitat.
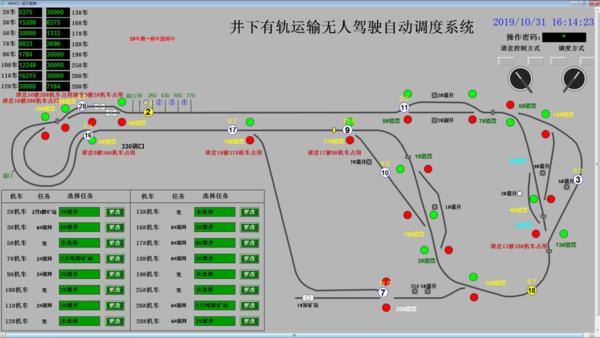
Enviament intel·ligent:Mitjançant la recollida de dades, com ara el nivell de material i el grau de cada canal, i després d'acord amb la posició en temps real i l'estat de funcionament de cada locomotora, la locomotora s'assigna automàticament al treball.
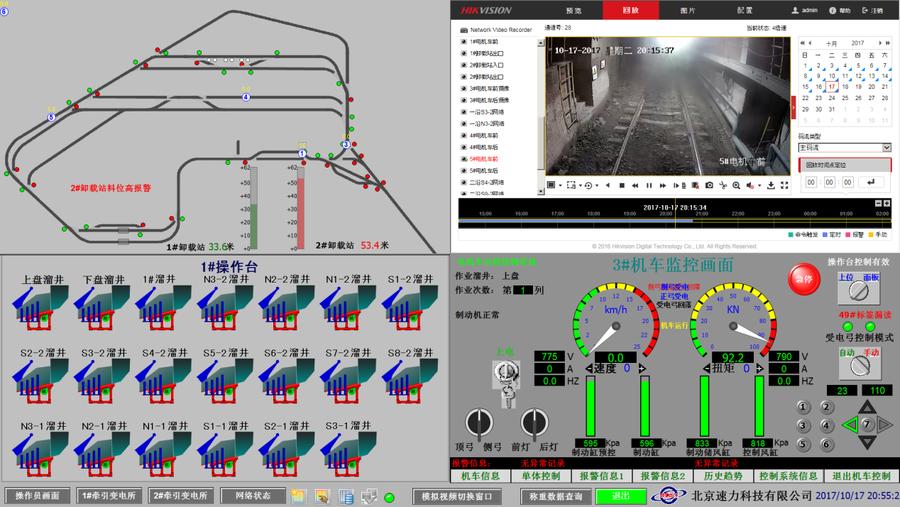
Càrrega manual remota:La càrrega manual remota es pot aconseguir a la superfície controlant l'equip de càrrega.(Sistema de càrrega totalment automàtic opcional)
Detecció d'obstacles i protecció de seguretat:En afegir un dispositiu de radar d'alta precisió davant del vehicle per aconseguir la detecció de persones, vehicles i caigudes de pedres davant del vehicle, per garantir la distància de seguretat del vehicle, el vehicle completa de manera autònoma una sèrie d'operacions, com ara sonar. la botzina i el frenat.
Funció d'estadístiques de producció:El sistema realitza automàticament anàlisis estadístics dels paràmetres de marxa de locomotores, trajectòries de funcionament, registres de comandaments i finalització de la producció per formar informes de funcionament de producció.
Aspectes destacats del sistema.
Funcionament automàtic dels sistemes de transport ferroviari subterrani.
És pioner en un nou mode d'operació per a locomotores electives subterrànies sense conductor.
Realització de la gestió en xarxa, digital i visual de sistemes de transport ferroviari subterrani.

Anàlisi de beneficis d'efectivitat del sistema
Subterrani sense vigilància, optimitzant els patrons de producció.
Agilitzar el nombre de persones que treballen i reduir els costos laborals.
Millorar l'entorn laboral i millorar la seguretat intrínseca.
Mecanismes de funcionament intel·ligents per gestionar el canvi.
Beneficis econòmics.
-Eficiència:augmentar la productivitat amb una única locomotora.
Producció estable mitjançant la distribució intel·ligent del mineral.
-Personal:conductor de locomotora i operador de llançament de mines en un.
Un treballador pot controlar múltiples locomotores.
Reducció del nombre de personal en posicions en el punt de descàrrega de la mina.
- Equipament:reduir el cost de la intervenció humana en els equips.
Beneficis de gestió.
Anàlisi de les dades dels equips per permetre el manteniment previ dels equips i reduir els costos de gestió dels equips.
Millorar els models de producció, optimitzar la plantilla i reduir els costos de gestió del personal.





